
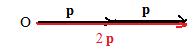
 An intuitive discussion about vectors multiplied by numbers. Let p be any position vector. It seems natural that 1p = p. The vector sum p + p of p with itself can be constructed using the triangle method: make a copy of p and put its tail on the head of p. It is natural to call the resultant 2p. In the drawing, 2p is a position vector with the same direction as p but is twice as long. A similar experiment shows that 3p = p + p + p is a position vector with the same direction as p but is three times as long. The following is an inductive generalization:
An intuitive discussion about vectors multiplied by numbers. Let p be any position vector. It seems natural that 1p = p. The vector sum p + p of p with itself can be constructed using the triangle method: make a copy of p and put its tail on the head of p. It is natural to call the resultant 2p. In the drawing, 2p is a position vector with the same direction as p but is twice as long. A similar experiment shows that 3p = p + p + p is a position vector with the same direction as p but is three times as long. The following is an inductive generalization:
[*] (Multiplication of a vector by a positive integer) The product of a positive integer n and a position vector is a position vector that points in the same direction and has a length n times the length of the original vector.
Notation: For any positive integer n, np = p + p + ... + p (n appearances of p) is a position vector pointing in the same direction as p and having a length n times as long as p.
Multiplication of a vector by an integer larger than 1 causes the vector to become longer.
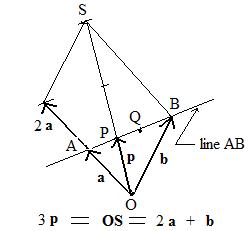
If segment OP is bisected to locate a point Q then a segment OQ half as long as OP is produced. Then q = (1/2)p. Similarly if segment OP is trisected to locate a point R nearest the origin, then segment OR is (1/3)OP and therefore r = (1/3)p. In general, OP can be divided into n congruent parts, locating a point T nearest the origin. Therefore, t = (1/n)p. Once that a position vector can be divided into n congruent parts,then the product (1/n) and the position vector is defined. If m is any positive integer, then (m/n)p can be defined as
[**] (Multiplication of a vector bye a positive rational number) The product of a positive fraction and a position vector is a position vector that points in the same direction and has length which is the fraction times the length of the original vector.
Notation: For the product (m/n)p, it points in the same direction as p and its length |(m/n)p| = (m/n)|p|.

[3.3] (Division of a segment into congruent parts) Let n be any integer greater than 1. Let α and β be numbers. If β runs through the integers 0,1,2,...,n-1,n and α = n − β then the position vectors
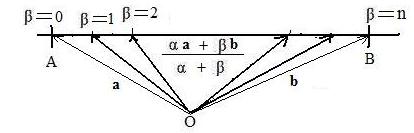
As β run through 1,2,...,n-1, (equivalently α = n - β runs through n-1, n-2, ..., 2, 1) then it is sufficient to show that λ runs through 1/n, 2/n, ..., (n-1)/n in the equation
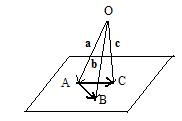 In Section 1 of the main page, it was stated that there is always some point O called the origin. This allowed the existence of position vectors. There was no condition imposed on the location of O. Although drawings there suggested that the origin and points under discussion all lie in the same plane, everything discussed there remains true when the origin is not in the same plane as the points. The adjacent figure shows points A,B,C in a plane (three non-collinear points determine a plane), but the origin O is not in that plane. Nevertheless, position vectors a,b,c joining the origin to the points exist and obey all the equations and statements made in Section 1. For example
In Section 1 of the main page, it was stated that there is always some point O called the origin. This allowed the existence of position vectors. There was no condition imposed on the location of O. Although drawings there suggested that the origin and points under discussion all lie in the same plane, everything discussed there remains true when the origin is not in the same plane as the points. The adjacent figure shows points A,B,C in a plane (three non-collinear points determine a plane), but the origin O is not in that plane. Nevertheless, position vectors a,b,c joining the origin to the points exist and obey all the equations and statements made in Section 1. For example
In Section 1 the condition that a point P lies on a line through distinct points A,B was given: that there exist scalars α and β whose sum is not zero and
Pass lines through points A and B and through points C and P. Since all four points are in the same plane, there are two situations: the two lines AB and CP intersect or are parallel.
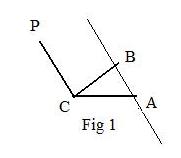 Situation1: Lines AB and CP are parallel (Fig 1).
Situation1: Lines AB and CP are parallel (Fig 1).
Then vector CP is proportional to vector AB. There exists a scalar λ satisfying
CP = λAB
Then position vectors
p − c = λb − a
Use simple algebra to get
p = −λa + λb + c
Choose α = −λ, β = λ, γ = 1 to get equation (**).
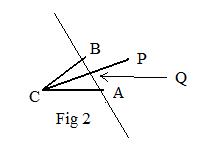 Situation2: Lines AB and CP intersect (Fig 2).
Situation2: Lines AB and CP intersect (Fig 2).
Let Q be the point of intersection.
Q is on line CP. Then vectors CQ and CP are parallel and hence proportional:
There exists a scalar λ satisfying
CQ = λCP.
Then
q − c = λp − λc.
or
(#) q = λp + (1 − λ)c.
Q is on line AB. Then by (*) above, using q in place of p:
(##) (α + β)q = αa + βb
Eliminate q in (#) and (##) by substitution and solve for the term λ(α + β)p to get:
(###) λ(α + β)p = αa + βb + (λ − 1)(α + β)c.
Let γ = (λ − 1)(α + β).
Then simple algebra shows that:
λ(α + β) = α + β + γ.
Substitution of these two scalar expressions into (###) produces equation (**).
Case I: α + β = 0.
Then β = − α. Also, γ ≠ 0. Also, γp = αa − αb + γc.
(γp − c) = α(a − b
γCP = αBA
CP = (α/γ)BA
CP || BA. (Fig 1)
These lines are distinct because A,B,C are not collinear.
Dintinct parallel lines determine a single plane.
But non-colliear points A,B,C line on both planes.
A,B,C,P all lie in the same plane.
Point P lies in plane A,B,C.
Case II: α + β ≠ 0.
Subtract γc from both sides of (**) to get:
(α + β + γ)p − γc = αa + βb.
Let (α + β)q = each side of this equation. Then Q is on the point of intersection PC and AB.
Points A,B,C lie in the plane of these intersecting lines PC,AB. (Fig 2)
Since A,B,C are not collinear they determine a single plane ABC.
The plane of intersecting lines must coincide with plane ABC.
P lies in plane ABC.